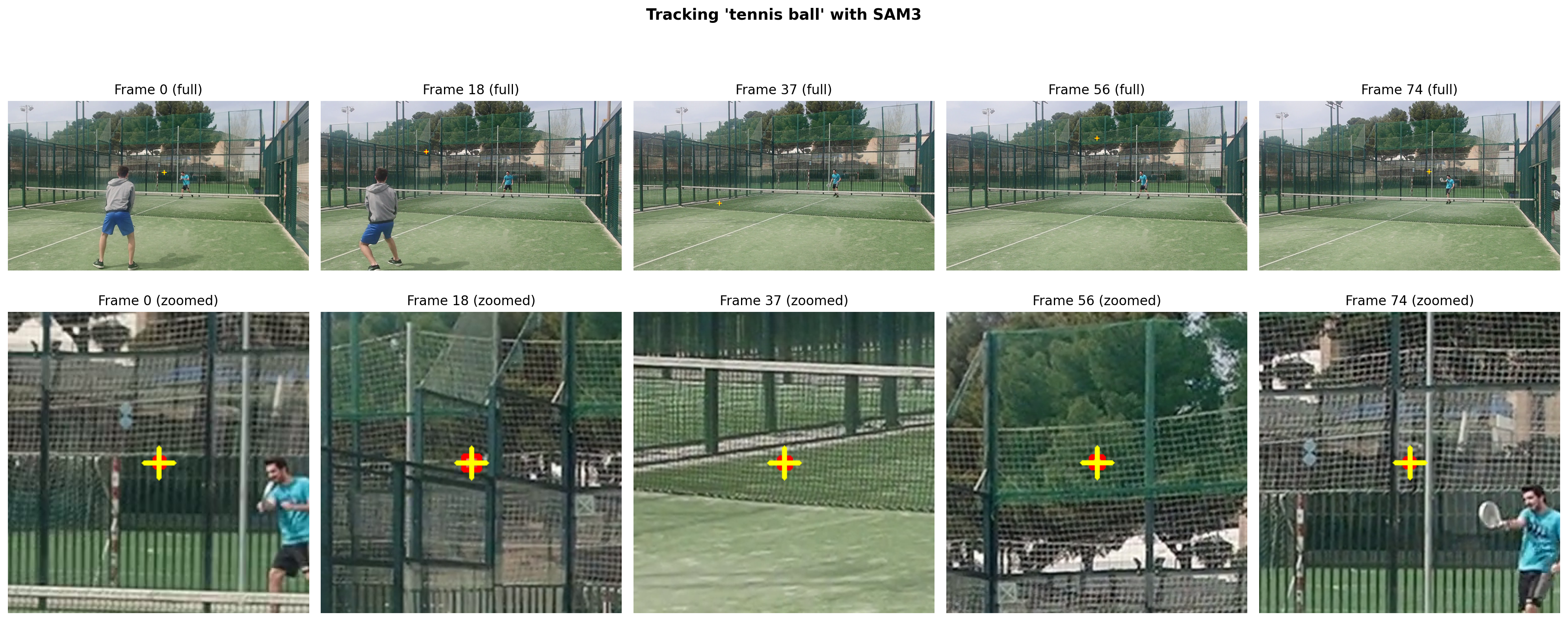
# Show tracking on key frames with ZOOMED IN views around the ball
key_frames = [0, len(video_frames)//4, len(video_frames)//2, 3*len(video_frames)//4, len(video_frames)-1]
key_frames = [f for f in key_frames if f in outputs_per_frame]
fig, axes = plt.subplots(2, len(key_frames), figsize=(4*len(key_frames), 8))
for i, frame_idx in enumerate(key_frames):
frame = video_frames[frame_idx].copy()
output = outputs_per_frame.get(frame_idx, {})
h, w = frame.shape[:2]
cx, cy = w // 2, h // 2 # default center
if 'out_obj_ids' in output and len(output['out_obj_ids']) > 0:
probs = output['out_probs']
masks = output['out_binary_masks']
boxes_xywh = output['out_boxes_xywh']
# Select only the best object (highest score)
best_idx = np.argmax(probs)
best_mask = masks[best_idx]
best_box_xywh = boxes_xywh[best_idx]
# Get center of the ball for zooming
x, y, bw, bh = best_box_xywh
cx = int((x + bw/2) * w)
cy = int((y + bh/2) * h)
# Draw on frame - use cv2 for more control
# Draw filled mask
mask_overlay = frame.copy()
mask_overlay[best_mask] = [255, 0, 0] # Red
frame = cv2.addWeighted(frame, 0.5, mask_overlay, 0.5, 0)
# Draw bounding box
x1, y1 = int(x * w), int(y * h)
x2, y2 = int((x + bw) * w), int((y + bh) * h)
cv2.rectangle(frame, (x1, y1), (x2, y2), (255, 0, 0), 3)
# Draw crosshair at center
cv2.drawMarker(frame, (cx, cy), (255, 255, 0), cv2.MARKER_CROSS, 30, 3)
# Top row: full frame
axes[0, i].imshow(frame)
axes[0, i].set_title(f"Frame {frame_idx} (full)")
axes[0, i].axis('off')
# Bottom row: zoomed in (200x200 crop around the ball)
zoom_size = 150
x1_crop = max(0, cx - zoom_size)
x2_crop = min(w, cx + zoom_size)
y1_crop = max(0, cy - zoom_size)
y2_crop = min(h, cy + zoom_size)
zoomed = frame[y1_crop:y2_crop, x1_crop:x2_crop]
axes[1, i].imshow(zoomed)
axes[1, i].set_title(f"Frame {frame_idx} (zoomed)")
axes[1, i].axis('off')
plt.suptitle("Tracking 'tennis ball' with SAM3", fontweight='bold', fontsize=14)
plt.tight_layout()
plt.show()